Prof. SHEN Yajing and Team Create World's Smallest Multifunctional Biomedical Robot for Interventional Diagnosis and Treatment
Researchers led by Associate Professor SHEN Yajing from the Department of Electronic and Computer Engineering (ECE) have successfully created the world's smallest multifunctional biomedical robot, which is 60% smaller than existing models. This innovative robot is designed for imaging, high-precision movement, and multifunctional operations like sampling, drug delivery, and laser ablation. It offers superior imaging capabilities and improves obstacle detection by ten times, making it suitable for applications in narrow and challenging parts of the human body, like the lung's end bronchi and the oviducts.
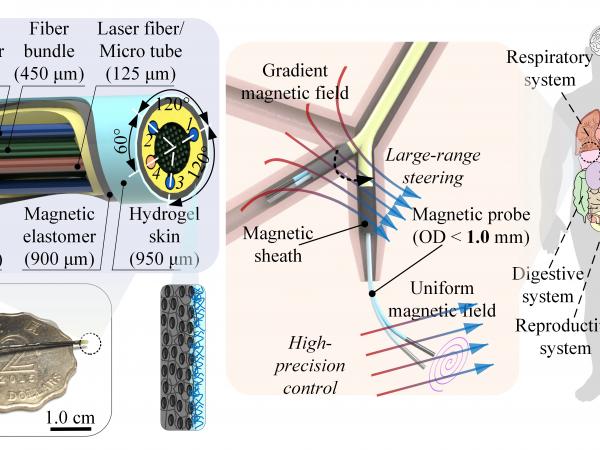
With a slim design of just 0.95 mm—60% smaller than current endoscopic robots—this device achieves an "impossible trinity" by integrating all three key specifications into one robot. It delivers competitive imaging performance and enhances obstacle detection distance to approximately 9.4 mm, a tenfold increase from theoretical limits. Additionally, it offers remarkable motion precision (less than 30 μm) and expands the imaging area by about 25 times the natural view.
The robot's miniature size is achieved through four key components. These are an optical fiber array for capturing internal body images, a custom tool for precise treatment delivery, a hollow skeleton for securing fibers and tools, and a functionalized skin that allows precise robot movement control. The hollow skeleton is crafted using a microscale 3D printer, while the functionalized skin is made via a magnetic spray technique, ensuring a compact design and smooth glide during surgery. It also has a gel-like outer layer to reduce friction. The team has tested this robot in in vitro bronchial models and ex-vivo porcine lungs, showing smooth navigation in tight spaces, successful image capture, and treatment execution in challenging areas.
Prof. SHEN highlighted the significant potential of this innovative robot for clinical use. "Small-scale continuum robots offer promise for interventional diagnosis and treatment, but current models often face challenges with compactness, precision in navigation, and integrated visualized functional treatment. Our research offers a pivotal solution for creating a surgical robot designed to achieve early diagnosis and therapeutic goals in difficult-to-access body areas. With advancing technology, the fiberscopic robot is poised to make substantial contributions to human health in the near future," he stated.
Thanks to their ability to traverse narrow cavities while offering quick recovery and low infection risks, small continuum robots have been used in treating various diseases, such as heart disease—through stent deployment and electrophysiology catheters—and the repair of gastric and duodenal ulcer perforations using single-port laparoscopy, among other applications. Building on this successful invention, the research team aspires to further enhance the robot’s capabilities for practical use in real-world settings.
Dr. ZHANG Tieshan, a postdoctoral fellow at HKUST and co-first author of the study with Dr. LI Gen, stated, "We aim to enhance the design and control of the fiberscopic robot, ensuring safety and reliability in interventional surgeries. We are eager to conduct in vivo trials to prove its clinical effectiveness." Other contributors from HKUST are Research Assistant Professor Dr. YANG Xiong and PhD student ZHAO Haoxiang from the ECE Department. Their research was recently published in Nature Communications.

Related Link:
HKUST School of Engineering
Nature Communications
Science Advances